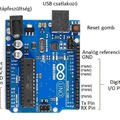
A blogra ezután felkerülő robotjaim irányítására az Arduino panelt fogom felhasználni, mert használata sokkal egyszerűbben elsajátítható, mint egy AVR ATMega mikrovezérlő működésének a megértése.
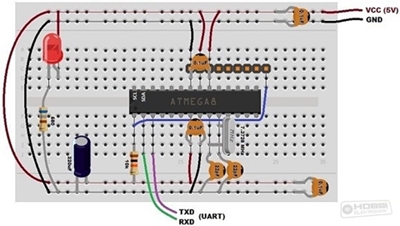
Akit azonban esetleg érdekelné az AVR perifériák regiszter szintű működése, azoknak ajánlom az ezekről a hobbielektronika.hu weboldalra írt cikkeimet:
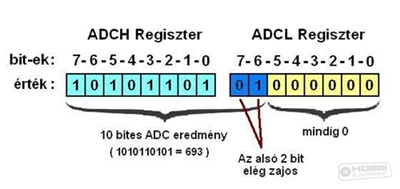
Analóg-Digitális Átalakító (ADC)
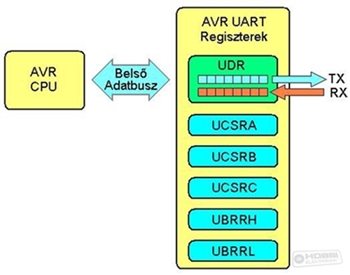
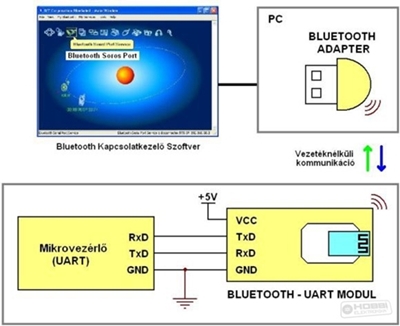
Bluetooth-UART modul használata
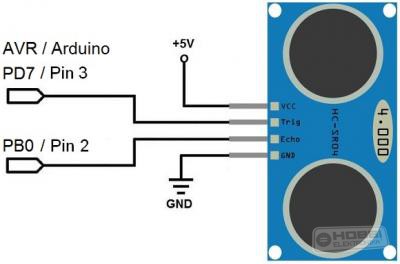
SRF-04 Ultrahangos távolságmérő szenzor használata Arduino-val és AVR-rel
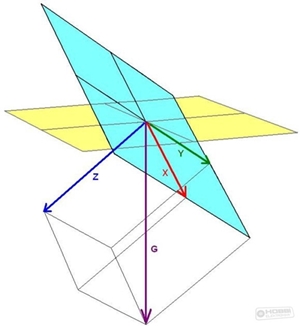
MMA7260QT gyorsulásmérő használata AVR-rel