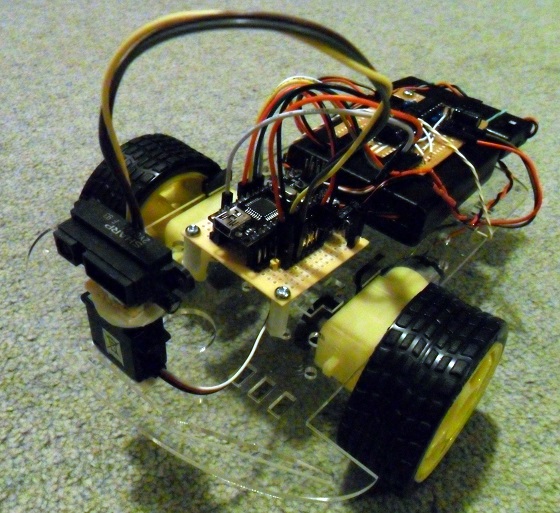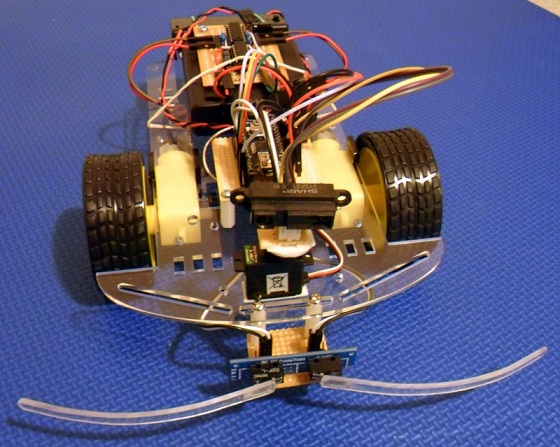
Az akadálykikerülő robot második verziója egy Sharp infravörös távolságérzékelő szenzorral érzékelte a körülötte lévő tárgyakat. A szenzor a robot elején, a talajhoz viszonyítva kb. 8-9 cm magasan lett elhelyezve és vízszintesen pásztázott. Az ennél alacsonyabb akadályokat nem tudta érzékelni.
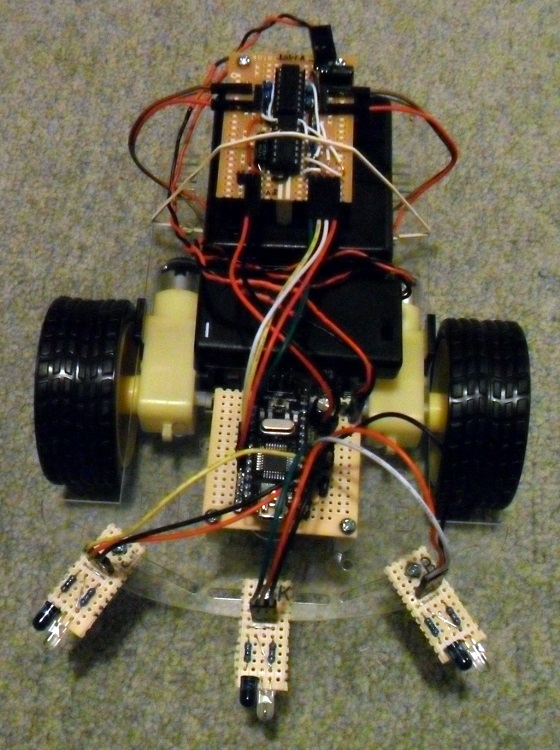
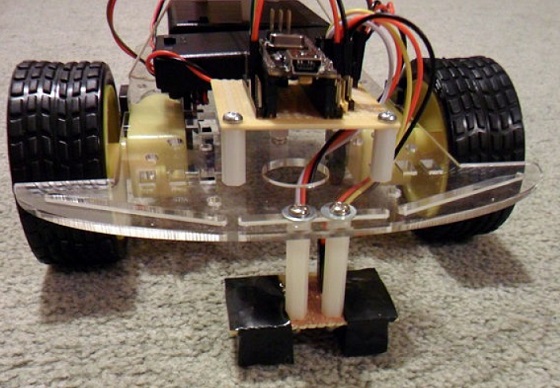
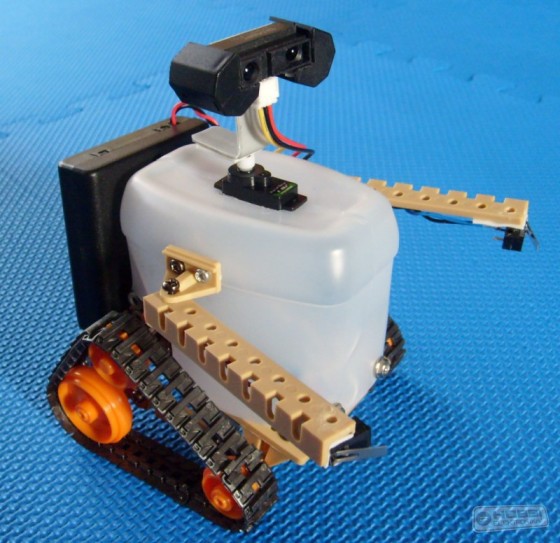
A robot harmadik verziójában, a fenti hiányosságok kiküszübölésére, egy mechanikus ütközésérzékelővel látom el a robotot, ami két mikrokapcsolót használ az alacsony akadályokkal történő ütközések érzékelésére.